Roadstar2017-09-20
现在无人驾驶的热潮,起源于2005年,美国国防部举办的DARPA Grand Challenge。04年的第一届没有选手跑出来,但是05年在荒野的比赛,有多支队伍成功跑完,斯坦福大学和卡耐基梅隆大学获得了第一、二名。
1.无人驾驶行业的现状分析
1.1 The origin:DARPA
现在无人驾驶的热潮,起源于2005年,美国国防部举办的DARPAGrandChallenge。04年的第一届没有选手跑出来,但是05年在荒野的比赛,有多支队伍成功跑完,斯坦福大学和卡耐基梅隆大学获得了第一、二名。
而2007年的DARPA Urban Challenge,把挑战放到了城市路况中,这次是卡耐基梅隆大学,斯坦福大学和弗吉尼亚理工大学分别获得了第一,二,三名。
通过美国国防部的比赛,向世人证明了无人驾驶技术上的可能性。
1.2 Google延续了DARPA的技术,从09年一直在不断的研发
Google看到DARPA中无人驾驶技术的未来,于2009年将斯坦福AILab的负责人,也是DARPA中斯坦福大学队原型车的负责人Sebastian招到Google,和他的原班人马一起,继续无人驾驶领域的研究。GoogleX于2010年1月正式成立。
从09年到2016年6月,Google的无人车累计行驶了2,777,585公里。光2016年8月这一个月,无人车就行驶了202,777公里。
截止到现在,Google的无人车已经累计行驶了500万公里。最新的技术实力,可以达到平均连续8000公里1次人工干预的水平。
2016年12月,Google正式将GoogleX中的无人驾驶业务分拆出来,成立了独立公司Waymo。
由于Google对无人驾驶技术的大力推进,在硅谷大家都能看到最前沿的技术似乎已经能很快的得到普及。目前,Google的无人驾驶技术还是公认世界最高的水平。
1.3 Tesla的探索—激进的先驱者
Tesla从2014年底的车型开始,就为用户提供可选的“辅助驾驶包”。采用的是Mobileye提供的ADAS技术。
随后,由于技术路线上的差异,Tesla于2016年7月终止了和Mobileye的合作。目前Tesla的技术路线主要依靠8个环绕摄像头,1个毫米波雷达和12个超声波传感器。
Tesla的野心越来越大,宣称要在2017年末实现完全无人驾驶,而2019年全面上路。

(图:Tesla的Autopilot--主要基于摄像头来做识别)

(图:Tesla当时的合作伙伴,Mobileye的设备)
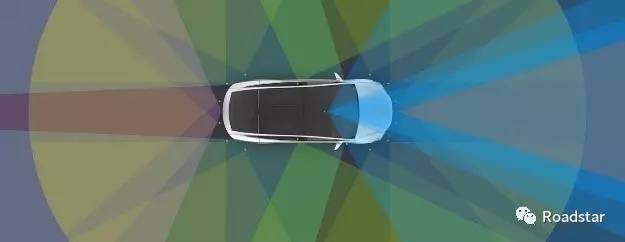
(图:Tesla的多传感器方案)
仅靠最简单的ADAS系统,在光照好的条件下也可以实现相当高的精度,但是业内普遍认为其安全性不达标。
Tesla的论据是,目前Tesla的车在“辅助驾驶模式”下累计行驶了13亿英里,而目前的事故概率相当低,至少是人类同等里程下的二分之一。所以目前的自动驾驶系统,已经可以实现强于人类两倍的性能。
现实中,2016年5月,Tesla的一名车主开启自动驾驶模式,在车上看视频,直接撞到拖车上身亡。根据事后调查,Tesla由于有免责声明,要求车主对驾驶负责,而不能完全交给系统,Tesla得以被判免责。
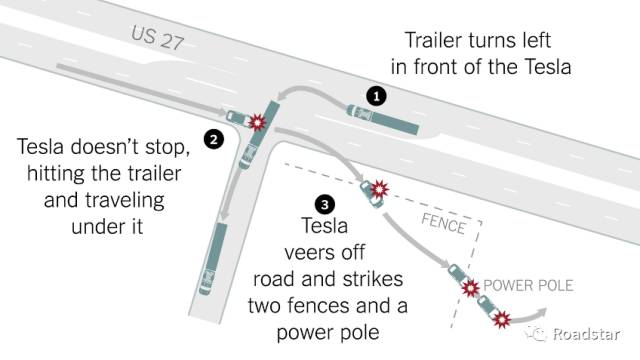
(图:Tesla车在自动驾驶模式下的严重事故)
因此,Tesla一方面宣称其技术可以实现Level4以上的“完全无人驾驶”,现实中为了免责,则要求用户仅将其当做辅助驾驶来使用。
虽然Tesla的技术路线较为激进,但是因为其广泛的消费者基数,吸引到了资本市场的强烈关注,可以说掀起了无人驾驶的热潮。
因为Google的车虽然在默默进步,但知道,乘坐过的人较少,而Tesla的车,有广大的车主基数。车主通过直观感受,觉得光是ADAS系统就离人们想象中的无人驾驶不远了。毕竟99%的安全,和99.9%的安全,在消费者看来其差异并不明显。
另一方面,Tesla极其擅长制造话题,也起到了推波助澜的作用。
1.4 Uber和Apple的探索
2015年UberCEO正式宣布要用无人驾驶技术来提供服务,招了一些卡耐基梅隆的研究员,使用LiDAR+摄像头的多传感器融合技术。
2016年8月,Uber收购了做无人驾驶的公司Otto。同年9月,Uber正式在匹兹堡提供基于无人驾驶系统的出租车服务。同年12月,在旧金山提供同样的服务。
截止至今,Uber的技术还略逊一筹,实际效果没有达到Uber的预期。目前Uber的车队有43辆车,无人驾驶模式下每周行驶20,000英里,平均连续0.8英里一次人工干预。

(图:Uber的无人驾驶租车)
Apple于2014年末开始正式启动内部名为“Project Titan”的野心勃勃的造车计划—完全无人驾驶的电动车。据内部人士透露,Apple是和一家机器人公司合作开发的技术原型车,采用最新的多传感器融合技术。该机器人公司是Virginia Techspinoff出来的公司,也曾经是Virginia Tech参加DARPA Challenge的团队和合作伙伴。
起初Apple是希望造一台类比Tesla的电动车,但16年战略发生了变化,Apple希望打造一台“完全无人驾驶”的电动车。这辆车上不会有方向盘,预计最早2020年投入市场。
而2017年6月,AppleCEO对公众承认了苹果对无人驾驶领域的兴趣,但是否认了造车,而是说在研究无人驾驶技术的软件。
1.5 无人驾驶技术指标对比—距离实现Level4还有多远?
尽管指标的选择有所差异,按照加州的规定,申请了无人驾驶牌照的公司需要报备各自的无人驾驶运行情况。其中最核心的指标,是累计无人驾驶下的里程数,和平均连续无人工干预里程数。

(图:Waymo,车厂代表的Nissan和Uber的指标对比)
从结论来看,Google的技术依然瑶瑶领先其他可比公司,累计行驶了500万公里,而最新的技术可以达到平均连续8000公里1次人工干预。作为主机厂中比较先进的Nissan,大概是平均230公里1次人工干预。而Uber的水平,大概还停留在平均1.5公里1次人工干预,可以看到大家的差距还较大。
国内的百度,据消息称,目前水平和Uber相当。
根据业内普遍的看法,如果无人驾驶车辆的安全性能够达到人类的10倍以上,就可以完全替代人。那么也许完全实现无人驾驶需要的技术目标,大约在连续10万公里1次人工干预的水平。
恰恰因为Google的水平已经非常高,让资本市场看到了短期内(3-5年)实现足够安全性的可能,目前各家企业都在拼命冲刺技术的最后五公里。
1.6 蓬勃涌现的无人驾驶初创企业—向胜利发起冲锋的号角
从2015年开始,不断出现做无人驾驶的初创企业。这里我们摘取了一些典型的,做接近于Level4(无人驾驶和辅助驾驶的定义见后续分析)技术的企业,供大家分析。

(图:根据网上信息收集整理的主要Level4无人驾驶startup)
可以看出,2015年和2016年,有很多从大公司,大学出来的初创公司开始进入该领域。无人驾驶系统的开发,呈现出百花齐放的状态。无人驾驶技术的黄埔军校,有斯坦福大学,Google,和国内的百度。
按照上述的分析,这些研究无人驾驶Level4技术的企业,都在努力试图用各自的技术方案,实现安全性达标,成本可控的“无人驾驶最后五公里”。
究竟谁能够摘取最终的桂冠呢?我们认为类比汽车行业的引擎,电池管理技术等核心模块,无人驾驶技术应该也不会呈现出一家独大的情况。最终应该有大公司,也有一些初创公司可以做出性能和成本达标的产品。
1.7 无人驾驶还是辅助驾驶
根据SAE的分类,无人驾驶从Level0到Level5。更加详细的分类标准在网上已经有很多,我们就不做详细的科普。这里做一下简单的定义,并且给大家举例说明一下。

(图:无人驾驶的分类简述)
根据定义,Level2到Level3应该划分为“辅助驾驶”的范畴。之所以称之为辅助驾驶,是因为这个等级下,驾驶员要承担驾驶的完全责任,无人驾驶系统不承担一切事故的后果。
目前Level2的ADAS系统的成本价降到1,000人民币以内,前装的售价也在数千人民币以内,可以算是得到了较好商业化的汽车智能化配件。海外有著名的Mobileye,国内也有很多做ADAS系统的对标企业正在努力赶超。
Level2的技术虽然可以实现全面的驾驶辅助,但是由于对安全性的要求较低,效果很多时候是根据驾驶员的主观感受而决定的,可以说技术门槛也相对较低。目前很多主机厂,都在研发自己的ADAS系统,对Mobileye进行替换。
Level3,是在Level2的基础上,增加了更多的传感器,提高安全系数后,能够在部分路况下完全接管汽车的控制的系统。比如说一辆车从市区开到高速公路,在高速公路上可以实现无人驾驶下的定速巡航(Tesla已经提供这项功能)。但是其问题是,由于适应的路况较为少,而且系统还是要求在发出请求后人类驾驶员必须在六秒钟之内接管,无法实现真正的人类替代。
对于国内目前涌现出来,做低速无人车如机场摆渡车,园区高尔夫车等等的企业,由于行驶速度非常低(10km/h),安全性的要求也会低很多。一般而言,我们将其技术归类到Level2到Level3。
而Level2,Level3,虽然有着较为可见的应用,他们所需要的技术和Level4以上还是泾渭分明的。也许和很多人想象得不同,并不能实现从Level2向Level4的逐渐升级。Level4的主要技术,是要实现在市区环境下的完全无人驾驶—这需要系统具备极高的安全性。而Level4的最大特征,在于给定事先定好的区域,就可以实现“完全无人驾驶”。这样的话,商业上可以实现对人类驾驶员的替代,可以改变传统的生产关系。而Level2,Level3的技术,最终还是“帮助”人类驾驶员把车开得更好而已。
正因为Level4有着巨大的技术挑战和相应的更广阔的市场空间,目前Level4无人驾驶技术是市场关注的焦点。
2.无人驾驶行业的现状分析
2.1 车载传感器一览
无人车使用的传感器,大的来说有以下这些类别:激光雷达,摄像头,GPS(包括差分GPS),IMU(惯性制导),毫米波雷达,超声波雷达等等。
虽然人类可以只通过视觉和听觉就实现驾驶,但是机器人缺乏能够有效识别场景的大脑,需要通过更强的“五感”,来弥补这个缺陷。传感器,可以说是无人驾驶汽车的眼睛和耳朵。
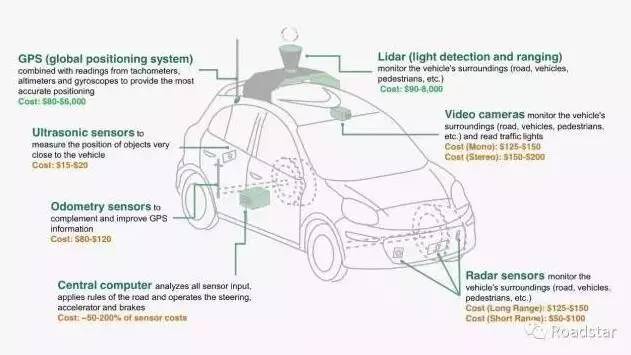
(图:车载传感器的案例)
2.2 主要传感器之LiDAR
而现在不同传感器类别中,源自于DARPA的激光雷达(LiDAR),被认为是无人驾驶最重要也是最必不可缺少的传感器。相比起其他传感器,他最大的优势在于对于空间的测量非常精确,可以保证相对高的安全系数。

(图:传感器的优劣势对比)
目前全球的LiDAR供应几乎被Velodyne垄断。价格昂贵,最便宜的16线7,900美金,最贵的64线80,000美金一台。
机械式激光雷达通过高速旋转,能够通过点云形成对周边空间环境的准确感知,各家无人驾驶厂商需要开发自己的点云特征识别技术。
2.3 LiDAR开发的激烈竞争
目前全球范围内,技术比较成熟的厂商还只有源自DARPA的Velodyne一家。但是也有数不尽的初创公司诞生,试图挑战Velodyne的垄断地位。
而LiDAR本身,也有一个最新的技术方向,就是摒弃Velodyne的机械旋转设计,用相控阵技术实现固态的激光雷达。固态的激光雷达虽然最高线数只能到达16线。但是更易量产,成本也可以做得更低。被普遍认为是激光雷达的究极解决方案。最终的成本,可以降到100美金一个,和摄像头相仿。
2.4 只采用摄像头是否靠谱—DeepLearning的能力边界在哪里
今年由于DNN(DeepNeuralNetwork),也就是深度学习技术的进步,有很多基于此的新算法诞生。很多学者说仅仅依靠DNN技术,就可以实现类似人类的驾驶—只依靠摄像头的视觉信息,实现Level4级别的无人驾驶。
其代表,就是来自于Princeton大学AI领域的教授肖建雄创立的AutoX,和来自于斯坦福大学AILab,著名AI三驾马车吴恩达太太创立的Drive.ai。
然而,也许是发现只依靠视觉信息和DNN无法实现Level4要求的安全性,加上摄像头单一传感器的局限性,这两家企业目前都已经改变了当初宣称的做法。
AutoX说他们是“CameraFirst”,未来LiDAR降价后会加上LiDAR。而Drive.ai说他们在使用DNN算法来识别LiDAR产生的点云—而不是仅仅用在摄像头上。
从我们的角度看来,因为LiDAR降价是个必然到来的事情,因为价格高昂而不用LiDAR,降低系统整体的安全性与可靠性,可能得不偿失。
2.5 Level4无人驾驶的新技术体系—多传感器融合和DNN算法
Google开始做无人车是在2009年,基于斯坦福参加DARPA比赛时候的原型车。由于2009年摄像头的算法效果并不好,导致Google在今后的开发上,非常依赖LiDAR。不断对LiDAR算法遇到的cornercase(例外)进行算法层面的补充,也就是打补丁。而且,为了提高安全性,Google甚至自己制造了世界上唯一的128线LiDAR。也就是说,Google的技术体系中,高线数LiDAR是必不可缺的主传感器。
而近年来,主要有以下三个新的动向。
A.多颗低线数LiDAR对高线数LiDAR的模拟和替换
由于高线数LiDAR的生产工艺要求极高,Velodyne和谷歌的产量有限,而且成本非常高,导致使用LiDAR的技术方案普及遇到很大的苦难。近年来,有很多初创公司发现通过组合好多颗16线的LiDAR,也能达到不逊于单颗高线数LiDAR的效果。
B.多传感器,尤其是LiDAR和摄像头的算法融合
由于近年计算机视觉和深度学习算法的发展,摄像头的图像识别能力相比2010年前后有了质的飞跃。在传统使用LiDAR为主传感器的Level4无人驾驶,和采用更便宜的摄像头为主传感器的Level2ADAS方案的基础上,有了将LiDAR和摄像头数据进行融合的新尝试。通过LiDAR和摄像头这两种传感器的优势互补,可以用更加低性能的传感器,实现更高的安全性。
C.对于LiDAR点云数据,采用DNN算法
Google的时代,DNN还没有得到广泛的应用。所以Google对于点云的识别,采取的还是类似于ComputerVision的算法—提取特征。但是由于最近DNN的效果逐渐得到证明,也有一些新的尝试,用DNN来做点云数据的学习,并且识别物体。这个效果虽然还有待验证,但是我们相信最终这个方法在数据量大了以后会超越传统的特征识别算法。
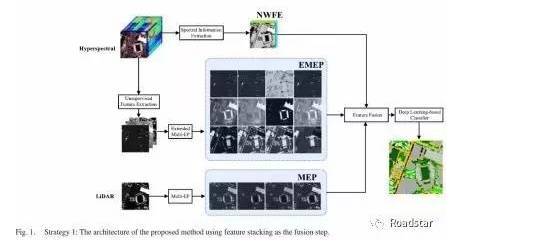
(图:DNN在LiDAR数据中的应用例)
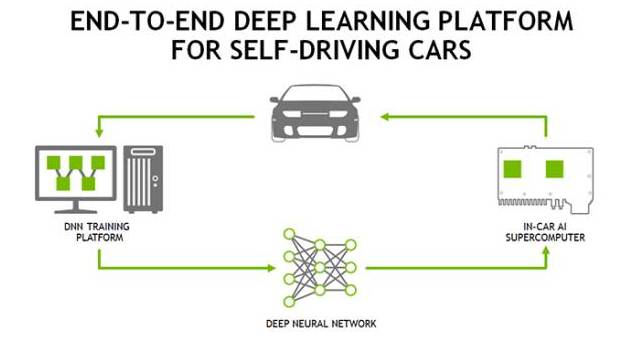
(图:Nvidia的DNN方案)
2.6无人驾驶是泡沫吗?
对于无人驾驶普及而言,最关键的因素是性能和价格。
从价格的角度,业内普遍认为最贵的激光雷达,会在今后五年内价格降低到不碍事的程度。
现在问题的关键因素在于,无人驾驶是否能符合大家的预期,在可预见的短期内达到技术的成熟。
近年,谷歌的技术已经达到了8,000公里一次人工干预的水平。这个水平对于很多人而言,已经非常接近于实现了Level4。而Tesla,更是激进的认为仅靠摄像头和超声波雷达,毫米波雷达的方案,就已经能够实现两倍于人的驾驶能力。让我们保守一点,假设连续100,000公里一次人工干预是Level4无人驾驶的基础要求。
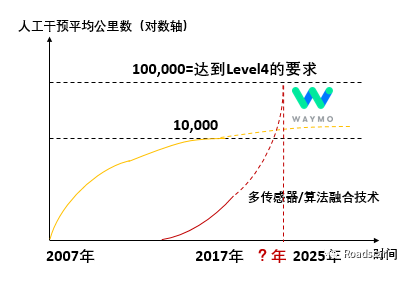
(图:技术的发展预测图,黄线是Google的方案,红线代表新的技术体系)
根据刚才所述,采用新的技术架构下,我们认为Level4无人驾驶技术,有希望在2025年之前的某个时间,达到足够好的安全性。而无人驾驶是否破灭,则要取决于图中虚线所代表的未来的技术进展。
另外,根据Gartner著名的HypeCycle来看,无人驾驶已经处于泡沫期的最后阶段。而他们的预测中,无人驾驶的普及需要远大于10年的时间。Gartner对于无人驾驶技术还是抱着相对保守的态度。
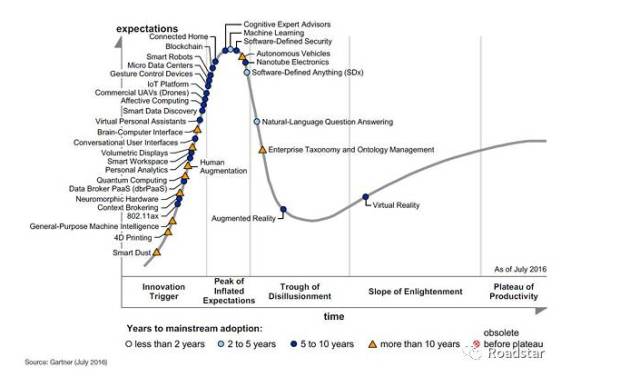
(图:Gartner著名的HypeCycle图)
最终无人驾驶是否会是一个泡沫,有待于接下来三年内技术的进步来揭开这个谜题。我们团队对无人驾驶技术的未来,充满信心。
3.中国市场的独特性
3.1中国道路的技术挑战
目前世界的无人驾驶路测,主要是在硅谷地区。而中国的道路交通情况,相比起硅谷,或者其他发达国家,路况更加复杂。目前主流的无人驾驶算法,都需要解决cornercase的问题,无论是通过不断更迭算法打补丁的方式,还是通过DNN,收集数据来解决,都需要实际上接触大量的cornercase,才能够实现。
因此,把硅谷的算法平移到中国,是一定会失败的。比如Google在旧金山湾区跑得很完美的无人车,开到德州就问题百出了,更不要说来中国了。

(图:中美路况的对比)
因此,中国市场急需要针对中国的路况而开发的系统,不在中国进行大规模的路测收集数据,就无法实现在中国本土的Level4无人驾驶落地。
3.2 中国的无人驾驶发展现状
根据工信部推出的《中国制造2025》的规划,中国2020年,2025年关于无人驾驶的目标如下:
在《中国制造2025》重点领域技术路线图中,智能网联汽车分为DA、PA、HA、FA四个级别,其中,PA指部分自动驾驶,HA指高度自动驾驶,FA指完全自主驾驶,驾驶权完全移交给车辆。
2020年,汽车信息化产品自主份额达50%,DA、PA整车自主份额超过40%,掌握传感器、控制器关键技术,供应能力满足自主规模需求,产品质量达到国际先进水平。启动智慧交通城市建设,自主设施占有率80%以上。
2025年,汽车信息化产品自主份额达60%,DA、PA、HA整车自主份额达50%以上;自主智能卡车开始大规模出口。制定中国版完全自主驾驶标准,基于多源信息融合、多网融合,利用人工智能、深度挖掘及自动控制技术,配合智能环境和辅助设施实现自主驾驶,可改变出行模式、消除拥堵、提高道路利用率,综合能耗降低10%,减少排放20%,减少交通事故数80%,基本消除交通死亡;FA智能化装备率10%,自主系统装备率40%。
另一方面,国内也有很多企业,高校,开始自主研发Level4无人驾驶系统。典型的比如百度,Volvo,国防科大和上汽等。很多都已经实现了较长距离的高速公路实验,以及封闭区域内的实验。
3.3 中国特色的无人车小镇建设
在政府和开发商的推动下,中国各地正在兴起“无人车小镇”建设热潮。典型的比如深圳和福建漳州。
深圳的无人车小镇(摘抄自新闻):
南方科技大学、密西根大学、前沿产业基金在深圳签订合作协议,宣布联合共建无人驾驶示范基地。该项目总投资规模100亿元,将选址在深圳龙岗区或深汕合作区,具体区域还在勘探和规划。
这个示范基地就是无人驾驶小镇。按照前沿产业基金联合创始人王乐京的设想,小镇内汇集智能汽车相关技术研发和创新企业,建造无人驾驶示范运行区,住宅、教育、医院等基础设施。员工步行就能上班,投资机构一天内可以洽谈多家企业。
王乐京想打造的是一个集智能汽车产业相关的「硅谷+Mcity」模式(Mcity是密西根大学建设的全球第一个专门用于测试汽车联网和自动驾驶汽车技术潜力的试验场)。按照规划,明年三季度到四季度将有第一批测试车在基地试用。
福建漳州的无人车小镇(摘抄自新闻):
漳州的“全球首个城市级无人驾驶汽车社会实验室”,基本上也是这个概念。据说,它还是Mcity在中国的独家合作伙伴,更与密歇根州政府和硅谷库比蒂诺市签署了战略合作协议。
它将落户漳州招商局经济技术开发区(下称“漳州招商局开发区”)。该项目计划构建三个关联递进的试验场景,包括60万平方米的封闭测试场、200万平方米的产业园区实验场(既是产业聚集区,也是新的出行方式的实验区),最后在整个开发区(56平方公里)进行无人驾驶技术规管方式的规模化实验,形成与无人驾驶相关的法律制度、商业保险、技术标准等一系列制度框架。
漳州招商局开发区总面积56平方公里,是一个城市级别的物理空间,项目还将配套设立100亿产业母基金用于实验室的建设和对入驻企业支持。













